二人のエジソンアカデミーでの学習も気づけば半年(1/4)が過ぎました。先生もあっという間だなと少し前を振り返りつつ本日は碧依さんのみですが、自考力キッズの授業では出てこなかった新たな動力についての学習を行います。
新たな動力の名は「サーボモーター」
体験会で少し利用しただけなので、先生としては改めて授業で仕組みを説明する前に簡単なロボットを作ってその動きを見てもらおうと考えているようです。
  |
碧依さんに作成をしてもらったブロック投げロボットです。 左上が完成品で左下が動かすプログラムとなります。 |
習うより慣れよ的な発想で先生からまず動かしてサーボモーターの動きを見てみようと呼びかけられます。実際に動かした所以下のようになりました。
| 後ろからの撮影になります。 思ったようにしっかりブロックを投げています。投げる部分のブロックの角度が気になったようで何度か調整しながら動画のような角度に落ち着きました。 |
ある程度ブロック投げをした後に先生から次の質問がされます。
「サーボモーターを使って出来る事で思いつくことを教えてください」
碧依さんは少し考えた後に「物を投げる」「ハンドル」「関節」と先生が望んでいた回答をすべて出してくれました。そこで補足としてサーボモーターの用途として、ロボットカーのハンドル、ロボットの関節代わり、自動ドアやロボットアームの制御が出来ると先生からの説明の後はブロック仕分けロボットの作成を行いました。完成後は「白黒のブロックを赤外線フォトリフレクタを使って仕分けましょう」という内容のプログラム作成する前にサンプルの動作を一緒に確認しました。
| 今日碧依さんに作って欲しい動作を実際に見てもらいました。中々難しそうと言わんばかりの表情でしたが、がんばるか~と自身を励まして作成に挑んでくれました。 |
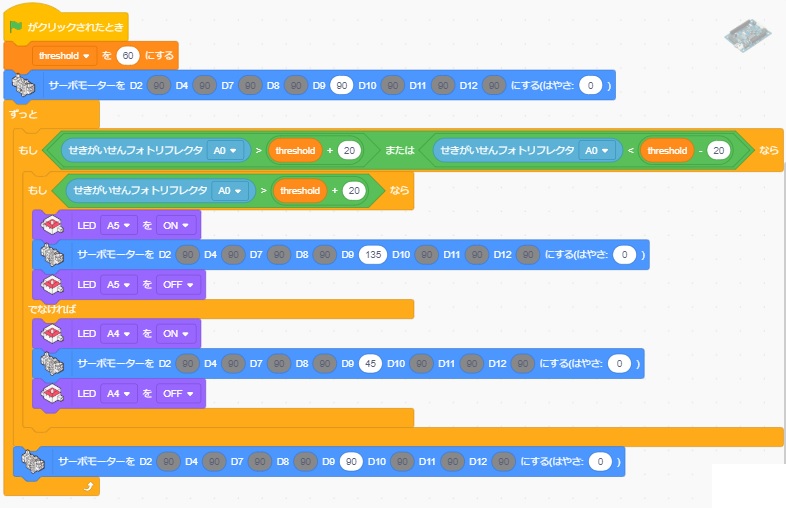
プログラムの方はテキストを見ながら進めています。最初にブロックがない時の赤外線フォトリフレクタの値を調べ、続いて黒ブロックのときの赤外線フォトリフレクタの値を調べた結果、ブロックが無い場合の値 < 黒ブロックの場合の値が正常な動作をしない値になっていました。碧依さんはまだ気づいていませんが、このままだと正常動作をしないという事で先生の手で赤外線フォトリフレクタの位置をもう少しブロックに近づける改造がされます。それによりセンサの値は黒ブロックの値 < 何もない時 < 白ブロックの値となりました。そうして完成したプログラムと動作が下の内容です。
 |
ブロックがない状態で黒ブロックを見つけたと判断をした為動かなくなりました。どうしてこうなったんだ…と言いたげな碧依さんに先生から、「最初に見たサンプルのように動かすにはどうすればよいかな?」と質問がされます。
しばらく考えた後に出た答えは、「ブロックがない時に動かされん」「どっちかにブロックを分けた後、サーボモーターを真ん中に戻さんといかん」…と
正しく問題点が理解できていると先生も嬉しそうに「正解」と返します。
そうしてプログラムの問題点についてどのように考えれば良いのかヒントを先生が出しました。碧依さんからの相変わらず字が下手と厳しい指摘が入りつつも、今のプログラムとこうしたらよいのではというプログラム内の処理のヒントを出しています。
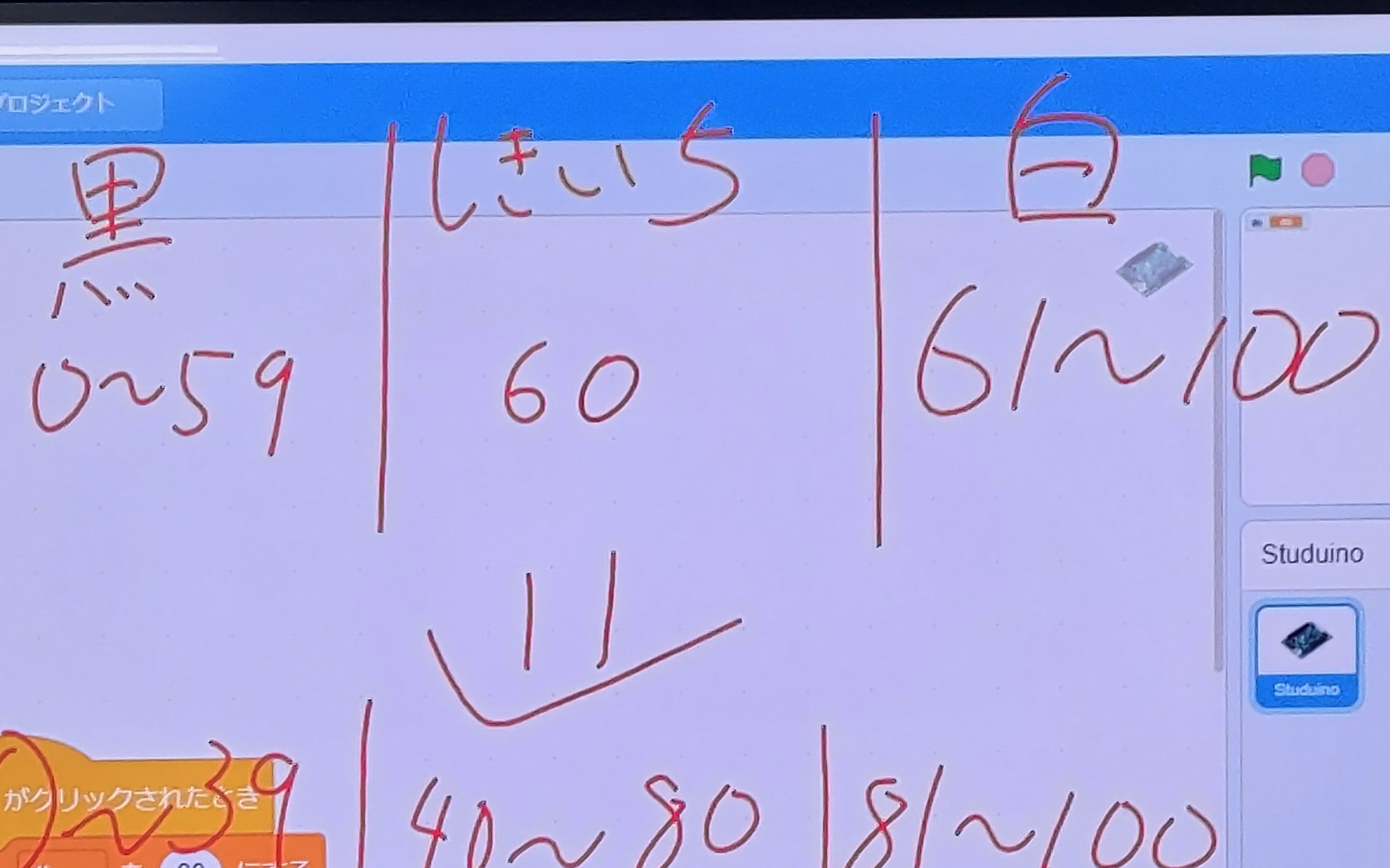 |
上が碧依さん作成のプログラムの値の範囲指定 60以外ではどちらかに動くことを確認してもらいその後下のようにプログラムを変えれば良くないですかとヒントが出されます。 |
それを受けて碧依さんも「しきい値を変える?」と先生に確認を取りますが、先生からは「しきい値はそのまま」と返事がありました。さてどうすればよいのかなと更に碧依さんが考え込む所で白黒の判断をする部分で数字がどれだけ変わったかを考えてみようという最後のヒントが先生から出されて「そういうことかぁ」と泰平君のような反応をした後先生が意図していた修正プログラムに辿り着きました。
最後に動作の確認をして先生のサンプルと同じ動きが出来た所で碧依さんもにっこり
気持ちよく授業を終えることが出来ました。
エレパチャレンジクラブにおける生徒たちの歴史が新たな1ページ
※登場人物や教室概要についてはこちら

