今回はクレーンゲーム機を模したロボットの作成に挑戦をしています。サーボモーターでアームを伸ばし、目的の位置まで動いた後はラックアンドピニオンを利用して手を下げて物を掴み、最後に戻ってくるという流れでロボットが動くことを説明しています。その際に碧依さんより「親がすごく得意で、いつも人形を取ってもらっている」と不器用な先生にはうらやましい話をしてくれました。
そういった話を終えてのロボット作成ですが、先生の方はセンサ―ケーブルの修復を始めた為、碧依さん一人で作成となりました。先生も流石に鬼ではありませんので、ケーブル修復が終わったら手伝うよと声をかけ、そうこうしているうちに先生のケーブル修復が終わり、碧依さんのロボット作成を手伝い始めました。先生もあまり手を出しすぎると本人の為にならないとは考えていた様で、どうしても難しい所のみ手伝うようにして作成の様子を見守っておりました。
流石に大きなロボットの為か作成に苦労をし、色々愚痴を言っていましたが、先生も「まぁまぁ 頑張って」と励ましながら少し時間はかかりましたがロボットが完成しました。
作成を頑張った苦労をねぎらう言葉が先生からかけられまんざらでもない様子の碧依さんでしたが、早速プログラムに入ります。
先生が動かす手順(作成するプログラムと関数)の説明をしていきます。
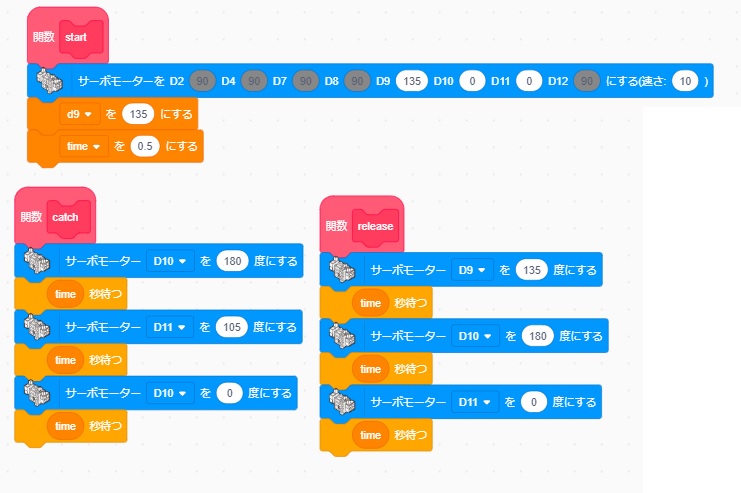
1.アームを初期位置設定する(碧依さんもいつものお約束やねと言っておりました)
2.アームを伸ばす
3.アームを下げてブロックを掴む
4.アームを元の位置に戻してブロックを離す
5.最初の状態に戻す
これらの説明を聞いて、1と5は同じという事が理解でき、3と4は関数で出来そうと言ってくれたので、1.3.4の関数を実際に動かしながら作成をしてもらいました。サーボモーターの角度調整が少し面倒かなとは思いましたが、先生が思っていた以上に順調に関数が仕上がりました。
 |
テキストのプログラム環境とは異なる為、予めどのようにプログラムをすればよいのかを先生の方で調べており、その内容に基づいてプログラムの作成をしてもらっています。 因みに待ち時間を設定しないで動かすときちんと動かないことは碧依さんにもしっかり見てもらっています。 |
最後に残ったのは2番のアームを伸ばす処理です。この部分は「タッチセンサーを押している間アームを伸ばして、タッチセンサーを離すとアームを下げる3番の動きをさせる」ように処理をどのようにプログラムするのかを考えてもらおうとした所、先にテキストをみて作っていた為、そのままプログラムの転送をして動かしてもらっています。
自分で動作を見ながらプログラムを作っていましたが、実際に動かすとブロックを掴む所や離す所で角度調整が甘かった部分もあったようです(左端と中央)。悔しい所がありながらも最後はしっかり出来ておりました。
ゲームセンターにあるような物とは違いますが、しっかり作成が出来ており先生も嬉しそうでした。縦と横に動かす仕組みを作れるのかと碧依さんから質問があり、先生からは「勿論可能です」と答えを得て、どんな風に作ればよいのかという所を先生と話をしながら授業を終えています。
エレパチャレンジクラブにおける生徒たちの歴史が新たな1ページ
※登場人物や教室概要についてはこちら

