本日の授業は前回作成したプログラムを流用すれば完成する内容です。
ただ、新たな内容も出てくるので、その部分も説明しながら授業を進めています。加速度センサーを用いた際にその存在は二人とも知っていた(説明は次回に持ち越しと話をしている)為、前後軸と左右軸の解説を復習として行いながら新たな上下軸の説明をしています。
「加速度センサーで上下軸の値が動くとき、それはその物体が加速しているのか減速しているのかを示しています。」と先生から解説がされますが、二人とも表情が(? ?)です。実際にテストモードで見てもらいながら解説をしています。先生も中々言葉だけではどういう状態なのか理解をしづらい内容でも、値の変化を見ながらだと理解できるかなと考えたようです。
加速度センサーのX軸、Y軸の値の変化にも触れつつ、今回は上下に振ってみましょうと先生から言われた二人は素直に上下にセンサーを振ります。
そうして値の変化を確認してもらいました。
 |
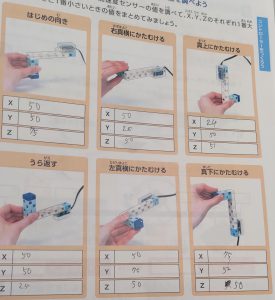 |
そうすると加速度センサーのZ軸の値が増えたり減ったりしているのが見えたようです。これが加速しているとき、減速しているときの起こる変化だよと説明をしています。二人とも加速度センサー値の変化を楽しむようにブンブン振っています。[このとき先生の脳裏には過去、加速度センサーを思い切り上下に振ってセンサーケーブルが切断されるという嫌な記憶がよみがえったと後から話していました。]楽しみながら値の変化を確認した後、色々な方向にかたむけて値の変化が生じる事も見てもらった後、ようやく本題にはいりました。
「ビートルバトルロボット」加速度センサーZ軸の値を変化させながら相手のタッチセンサーを押そうというバトルロボットの作成をしています。
碧依さん作成ひっかきネコ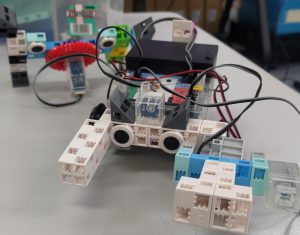 |
泰平君作成角角叩き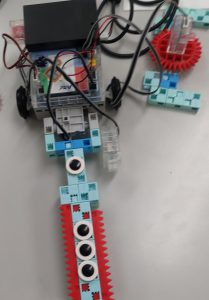 |
プログラムについてはとても楽できるよと先生は話をしていますが、二人とも「先生の事だから…」とこれまで簡単と言われながらも難しかったことを思い出し、疑わしいまなざしで見ています。先生も内心そんなことはないと思いつつも解説を行いながらプログラム作成を行っていきます。
プログラムは以前に作成した内容で、8割出来たものを使っている為、
◇攻撃を行う為の動きのプログラム
◇タッチセンサーを押されたときのプログラム
これを作るだけで完成という事を説明しています。
攻撃には加速度センサーZの値を見ながら行おうという事を話して攻撃を行う処理を行う為の条件を追加してもらいました。集合の考え方が出た為この部分の解説もしつつプログラム作成を行っています。
最後にタッチセンサーを押されたときのプログラムとしてLEDを光らせて動きを止める内容で作成をしてもらいました。
| 泰平君作成プログラム
良い感じに出来ていますと先生からも褒められました。 |

その後はそれぞれのロボット改造をしてもらい、勝負をしてもらいました。
(動画では碧依さんが勝利を収めていますが、泰平君の名誉のために、撮影前は泰平君が勝利をしています。)
勝負に白熱をしていた為か碧依さんの加速度センサーケーブルが切断され、そこで勝負は中断しましたが、二人とも中々楽しそうに学習と勝負が行えていたように思います。ただ、先生は「またケーブル修復かぁ~」と少々落ち込んでいました。
エレパチャレンジクラブにおける生徒たちの歴史が新たな1ページ
※登場人物や教室概要についてはこちら

