これまで2足、6足、4足の歩行ロボットを作成してきて最後に動物型4足歩行ロボットの作成に着手しています。最初に馬を例にして解説を行い、先生が知っている馬の歩様や馬体重などの話もしております。ここでは敢えて最初に正常に歩かないロボットを敢えて作成をしてもらいました。
プログラムも終えて実際に動かすと可愛らしい歩様ながらも動きが怪しい為、その理由を碧依さんに質問をしています。色々考えて答えを出してくれると思っていましたが、即座に「関節が足りん」と言ってくれました。そういえば最初から関節が~と言っていたなぁと先生も思いまします。
その後は関節を追加する改造を行い、プログラムも改めて作成をしてもらっています。足運びの角度調整プログラムもサンプルの絵を見ながら足の角度を決めればよいという事を説明して取り組んでもらい、半分まで出来た所で先生から「最初の半分と残りの半分を見比べて何か気づく点はありますか?」と質問が出されました。碧依さんはじっくりテキストを見て「左と右の動きを入れ替えたらいいんじゃない」とプログラムが楽できるポイントに気づいてくれました。その部分は先生が意図していた答えだったので、「では飛騨有⇒の部分を入れ替えて残りのプログラムを作りましょう」という事で碧依さんには残りプログラムを作成してもらっています。素直に入替をしていましたがずれが生じる部分も発生し、そこはしっかり調整をしてもらっています。
 前半部分のプログラム 前半部分のプログラム |
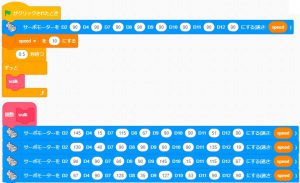 完成形 完成形 |
そうして完成した動作が下のようになりました。
ゆっくり動きますがしっかりした歩様で仕上がっています。先生もこの動きにはすごく満足していたようでした。
エレパチャレンジクラブにおける生徒たちの歴史が新たな1ページ
※登場人物や教室概要についてはこちら

