先生がこれまで作成及び学習してきた歩行ロボットの振り返りを簡単に行った後、二人に「何か作りたい歩行ロボットはありますか」と問いかけると「特にないです」と返事があった為、側転ロボットの作成をしてもらう事にしました。
「(作る為の)パーツ多すぎ…」なんてことも言っていましたが、実際に作成はあっという間に二人ともできており、「なんかあっさり終わった」という事で先生からは「プリントのお手本とこれまで学習した歩行ロボットの内容を思い出しながらプログラムしてください」という合図を基に二人ともプログラム作成をはじめました。
最初は意気揚々とプリントを見てプログラムを進める二人でしたが、段々手よりも口が動くことが多くなり先生からは「手と頭もしっかり動かそう」と言われます。そうこうしているうちにお手本にある部分のプログラムができ上ったようで「これで終わった!!」と喜ぶ二人でしたが、「半回転完了ですね。残り半回転頑張ってね」と言われ意気消沈な二人(下は碧依さん作成前半部分プログラム)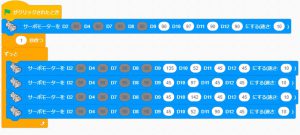
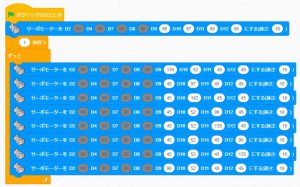
碧依さんは残りのプログラムをどうすればよいのかを考えている最中に何か思い当たったことがあるようで先生に自分の考えた事(上下の向きが変わるけど数値は同じで、入力場所が違うだけでしょ)を話しました。先生からは「いいですね ナイスですね」と言われ、自身の考えが正しかったことに気を良くしながらプログラムを続けていきます。一方の泰平君はどのように残りのプログラムを進めればよいのか考え込んでいた為、先生が先程碧依さんが言ってくれた内容をベースに説明をしていきます。そうしてそういう事かと理解が出来た泰平君は元気よくプログラムをはじめましたが、PCフリーズ。泰平君の元気を受け止めきれなかったかもとそれらしい話をして、泰平君には気を取り直して改めてプログラムをしてもらいました。(碧依さんプログラム完成)
 碧依さんの方が先に仕上がったので動かすと何故かうまく動きません。
碧依さんの方が先に仕上がったので動かすと何故かうまく動きません。
プログラムに異常はない様子。そうなるとロボット本体に何かトラブル発生かも
先生と一緒に碧依さんがロボット本体の確認をすると足の長さが違う事に気づきました。
 |
よく見ると左足の長さがブロック半分だけ短いです。碧依さんとしては全く気付かなかったようです。 |
その部分を修正して動かすと正常に側転を開始しました。しかし動きの遅さに不満があるようで、高速側転~と言いながらプログラムを修正しました。そしてその結果が・・・
確かに高速側転です。本人も満足をしていたのでこれで良しかなと先生も考えていました。もう一方の泰平君もきちんと仕上がって動作が出来ておりました。
こんな動きも面白いねと泰平君がその動きを見せてくれます。
その様子を見た先生思わずにやりとします。その直後に「これならDCモーターで本体を回転させながら動かした方が良いのかも」と泰平君話をして授業を終えています。
エレパチャレンジクラブにおける生徒たちの歴史が新たな1ページ
※登場人物や教室概要についてはこちら

