これまでのゲームプログラムから一転しロボットアームの作成に入りました。単なるロボットアームではなく、ブロックを見つけるまで移動し、見つけた後に所定の位置に設置する内容です。テキスト冒頭の解説で先生からこんな質問が出ました。幅20センチの範囲であるものを探す時、次の2つのロボットがあります。
①センサーを10個付け1秒で処理が終わりますが費用は20万円です。
②センサーは1つしかなくセンサーを動かしながら探す為処理時間は120秒かかるが費用は3万円 自分が買うとしたらどっち?と…
二人とも②を選んでくれました。[①を選んでいたらどうしようかと先生内心ひやひやしていたようです]その理由を聞くと、安いから, 違いが時間だけなら安い方がいいからと答えてくれました。その答えを聞いて先生から次のような説明がされました。「将来物を作る仕事に就くかもしれません。そうなった時、物を作る為考える事は沢山ありますが、高価な物を大量に使って出来上がった品が必ず売れるとは限りません。工夫次第で代わりの部品を使って同じ動作に近いものを安く作ることも可能です。」工夫することも物を作るうえで大事という事を覚えていてくださいと説明をした後ロボット作成に入りました。
少々説明が長くなったため先生も二人のロボット作成を手伝っています。そうしてロボットが完成した後のプログラム作成に入るのですが、まずは先生から簡単な部分を作ろうという事でブロックを掴んで置く内容のプログラムをしてもらっています。二人ともロボットがあるのでどのようにして掴むのか、そして置くのかという点をロボットの動きを見て作ってもらいました。仮作成ですがしっかり出来ておりました。
続けて赤外線フォトリフレクタを利用して白いブロックを探すプログラムの作成に取り組んでもらっています。碧依さんが「端から端まで動かしてその間にブロックを見つけたらOKなの?」と聞いてきました。先生も「その通り(今日はね)」と少々含みを持たせる言い方で碧依さんの考えが正しいと肯定しています。
それではブロックを探す為のプログラムを作ってみようと呼びかけて作成をしてもらっています。二人ともテキストを見ながらの作成ではありましたが、問題なく作成が出来ておりました。何で見つかった時に+20するの?と聞かれて「アームできちんとブロックを掴めるよう角度調整をしています」と答えています。
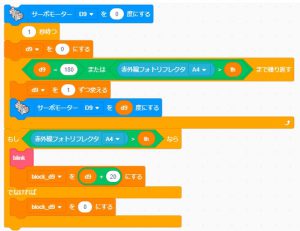
ブロックを見つけたら余計な動作をしない点もしっかり入っています。後はそれぞれ作成していたプログラムを繋げて完成しています。
実際に動作をさせる前に泰平君プログラムは正常動作をしないことが分かっていた為プログラムの修正をしてもらっています。本人は何が抜けたか気づいていませんでしたが、サーボモータD9を変数D9度にした後の待ち時間が抜けていたのでその部分の修正をしてもらいました。(この待ち時間がないとささっと進んでしまう事を忘れていたようです)そして実際に動作を見ています。
まずは泰平君作成のロボット
ブロックが乗らなかったのは残念ですが文句なしの動作です。
続けて碧依さん作成のロボット
歯車の動きが怪しい所はありましたがしっかりブロックが乗った点は非常に良いです。
こうして苦労しながら作成したスキャン機能付きアームロボットでしたが、次回はこれのパワーアップを行うというと二人ともげんなりした表情になっていました。
エレパチャレンジクラブにおける生徒たちの歴史が新たな1ページ
※登場人物や教室概要についてはこちら

